Реферат: Проект геодезического обоснования стереографической съемки масштаба 1:5000
m AB - ошибка взаимного расположения исходных реперов А и В.
Для средней точки нивелирного хода имеет место следующая формула:
mн ид = 0.5 mAB , 1.6
вытекающая из формулы (1.5)
Суммарная погрешность положения среднего пункта нивелирного хода на основании (1.4) и (1.6) выражается формулой:
mн 2 = 0.25 (h2 L+mAB 2 ), 1.7
При этом полагается, что влияние систематических погрешностей незначительно по сравнению с другими ошибками.
Оценка точности системы ходов с узловой точкой .
Рассмотрим систему трех ходов (рис. 4), где Рп 1, Рп 2, Рп 3 - исходные реперы.
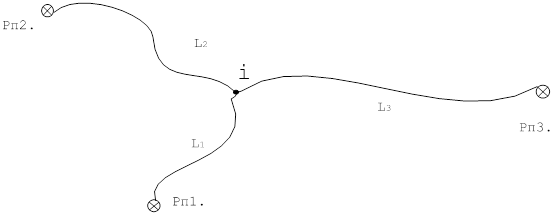
Система нивелирных ходов с узловой точкой.
На основании теории оценки точности уравненных элементов получим формулу для учета влияния случайных погрешностей измерений
mнсл =h(L1 - (L1 (L2 -L3 ))/N)1/2 1.8
В формуле 1.8 обозначено:
mнсл - погрешность отметки узловой точки;
L1 (L2 -L3 - длина ходов в км;
N = L1 L2 + L1 L3 + L2 L3 1.9
Так как исходные реперы в общем случае нельзя считать безошибочными, то возникает необходимость учета погрешностей исходных данных. Погрешность отметки узловой точки в системе трех ходов (рис. ) можно подсчитать по формуле:
L1
m н ид =------ * (L3 2 * m2 D H2,1 + L2 2 m2 D H3.1 )1/2 , 1.10
N
где m н ид - погрешность отметки узловой точки за счет погрешностей отметок исходных реперов;
m2 D H2,1 + m2 D H3.1 - погрешность взаимного положения исходных реперов.
Если принять m2 D H2,1 + m2 D H3.1 = mD H , то
L1
m н ид = ------ * m D H (L2 2 L3 2 )1/2 , 1.11
N
В данной работе оценку точности нивелирного хода выполняем по формуле:
m= h (LА,i (1-LA,i /L))1/2 .
h = 10 мм на 1 км хода для IV и h =25мм на 1км хода для технического нивелирования
1. A-F
LA,i =9.5 km
L=16.33 km
mAB =10(9.5(1-9.5/16.33))1/2 =19.33 mm
2 F-ОП
LAi= 6.4 км
L=12.2 км